
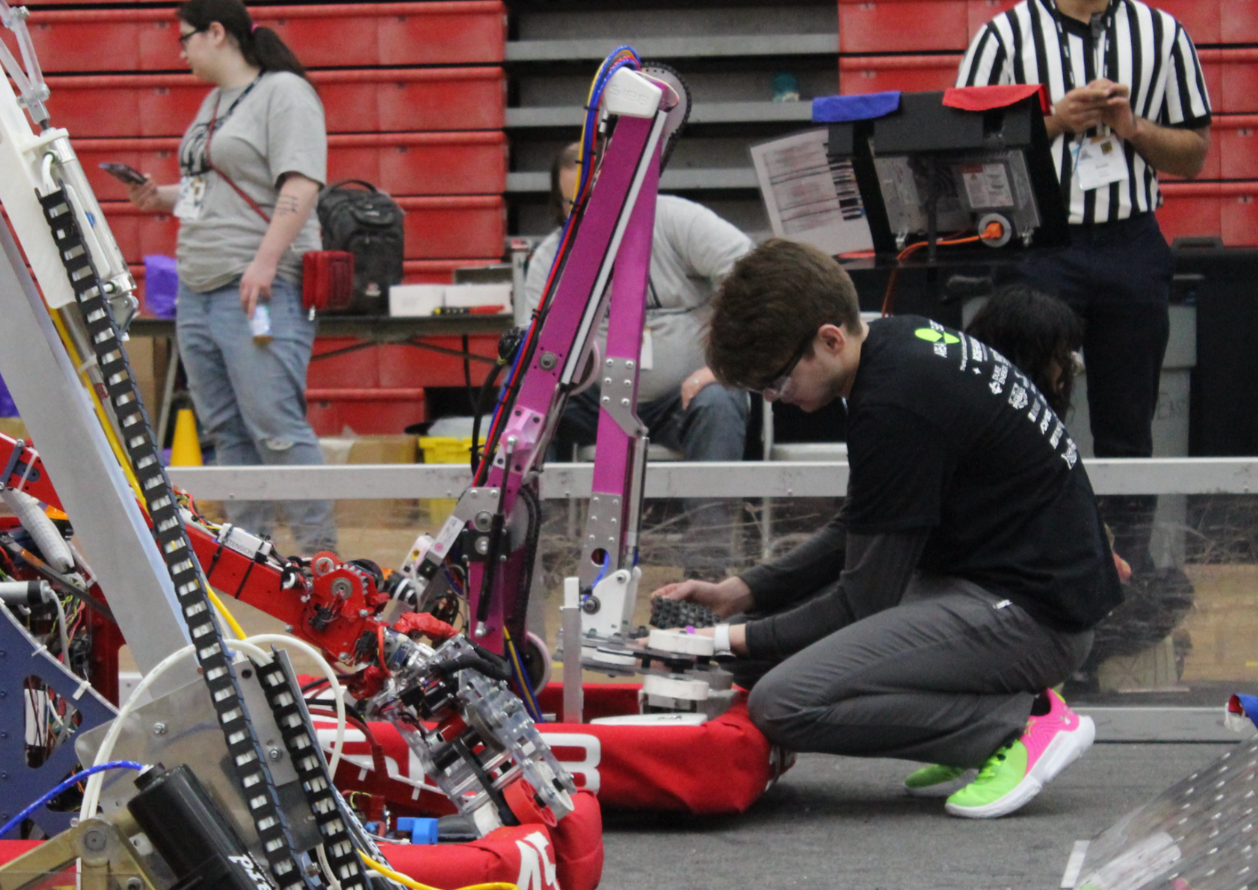
Designed the entirety of our 2023 competition robot in SOLIDWORKS
Fully custom 2DoF arm driven by a planetary + chain reduction and supported by gas shocks to counteract arm mass
Pneumatically actuated wrist/game piece manipulator with custom gear profile to ensure parallel actuation
Designed for head-on-head collisions by implementing a 3D printed wrist failure point to prevent bending of 6061 aluminum arm members
Custom potentiometer mounting using herringbone gears to reduce backlash, allowing for accurate measurement of shoulder and elbow position
---
Achieved best performance in 8-year team history including first district event win as an offensive robot